
助力中国质造 赋能极致研发
BOOST THE CHINESE QUALIFACTURING EMPOWER THE ULTIMATE EXPERIENCE DEVELOPEMENT
BOOST THE CHINESE QUALIFACTURING EMPOWER THE ULTIMATE EXPERIENCE DEVELOPEMENT
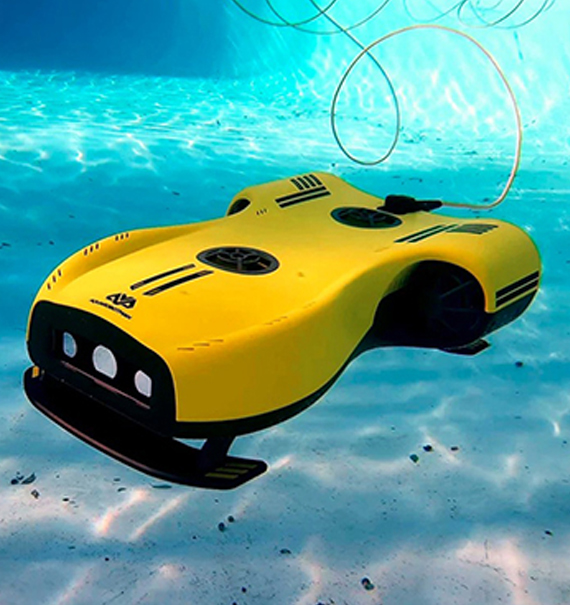
1、水下机器人工作环境非常恶劣,防水腔体需要承受100米水压,且必须防水耐压。而为了控制整机成本,必须采用常规工程材料,也因此对腔体结构设计提出了巨大的挑战。
2、水下机器人在复杂的水流环境下需要保持整机姿态的平衡。
3、在流体阻力作用下,如何保障多个推进系统协调工作也是重点研究的课题。
1、对密封腔进行结构力学仿真,确定密封腔的变形和应力状态,并优化密封腔结构以满足耐压要求。
2、采用联合仿真技术,在实际物理样机制作前,全面了解水下机器人的可能运行状态,并确定整机系统布置及控制系统是否匹配。
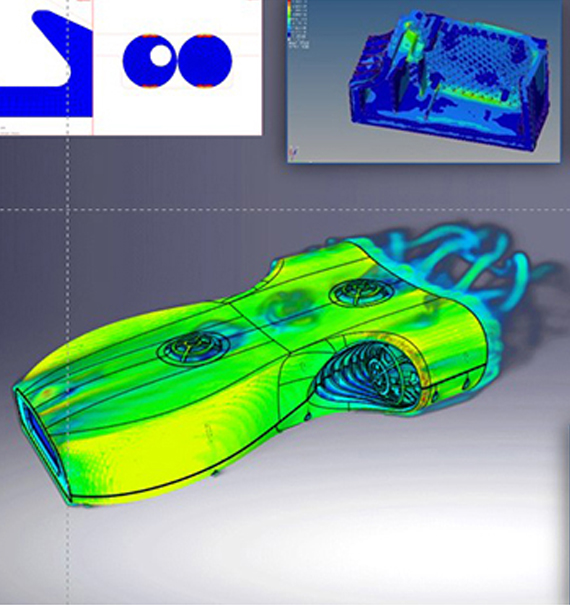
利用仿真技术避免了重复打样,大大缩短了产品开发周期,同时将控制系统调参的时间由3个月减少到1个月。
