DIANA 团队(Ducti Ingenio Accipimus Naturam Astrorum)是都灵理工学院的一个学生团队,致力于太空应用机器人的研究和开发。团队使用最新技术制作了漫游车的工程模型。 DIANA 团队希望将太空机器人技术提升到一个新的高度,同时提供一个体验式学习的平台。

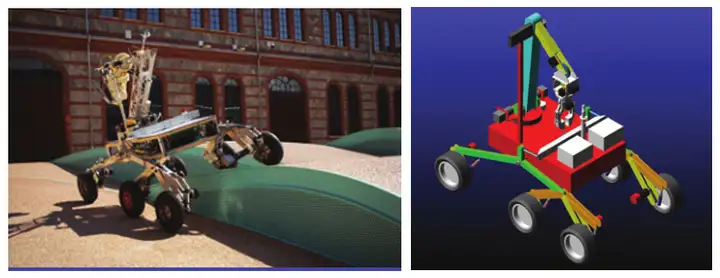
自 2008 年 成 立 以 来,DIANA 团 队 已 为 谷 歌 Lunar XPrize 大赛创作了月球漫游车 Amalia 和漫游车 T0-R0(图 1),这是火星漫游车的原型,曾参加 2018 年 9月在波兰举行的欧洲漫游车挑战赛(European Rover Challenge)。2019 年,团队开始研究一种新型火星漫游车,并在 2019 年的欧洲漫游车挑战赛上进行了测试。
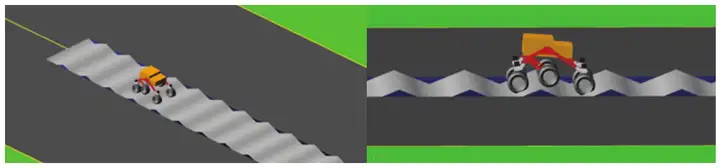
欧洲漫游车挑战赛为团队提供了一个前所未有的机会,可以在类似火星的环境中测试漫游车的行走系统。为了测试 T0-R0 漫游车的能力,在 2018 年欧洲漫游车挑战赛中,我们使用 Adams 中的多体仿真方法模拟了最严酷形态的火星土壤。由于比赛用的土壤的特性未知,因此进行了最坏情况下的虚拟研究。这使我们能够确定具体所需的电机,以启动摇杆式移动系统,并确定传动系统和悬架弹簧的尺寸。
进行太空设计总是意味着冒险进入未知世界。火星漫游车的开发过程中的主要挑战在于其将要运行的环境条件的不确定性。火星漫游车设计目的是能够在类似火星的土壤上行走、执行任务和试验、收集样本,并在承受类似火星地质条件的情况下自主导航(图 2)。

在 T0-R0 漫游车的初步设计阶段,幸亏在 Adams 中进行了多体仿真,解决了行走系统的不确定性。T0-R0 漫游车基于摇杆式移动系统,具有六个车轮和四个独立的电机。在有岩石和障碍物的粗糙土壤上导航期间,这个系统让火星车的有效载荷(电子元件,计算机和电池)得以稳定。
仿真过程的第一步是在 Adams / View 中用简化的几何形状构建漫游车模型,参与的部件具有正确的尺寸和惯量属性。 然后验证整个模型,由于 Adam / Tire 工具,添加了软土路面和充气车轮模型(图 3),以评估电机达到 3 Km / Hr 的速度所需的功率。
Adams 的参数化特性让我们能够理解模型中设计元素与性能要求之间的关系。例如,可以轻松更改连接摇杆与底盘的铰链的位置,从而节省大量时间。此外,设计变量的使用让我们能够捕获某些参数的变化对车辆动态性能的影响。
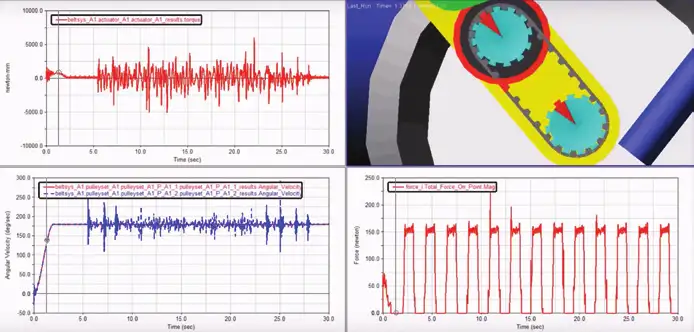
Adams 让我们可以使用 Adams / Machinery 工具对带传动系统进行建模(图 4)。考虑车辆在不同操作条件下(例如在不规则路径或遇到障碍物时),对弹簧的变形和应力进行了研究。
在 Adams 的虚拟环境中进行的仿真,使团队能够探索结构的极限,以建立能够在类似火星的地形上行走的漫游车能力,并能够通过建造单个样机和短短一年的开发周期执行所有需要的操作。漫游车一旦建成,在比赛任务和火星土壤上的表现与预期相符,这得益于从模拟中获得的见解,从而证实了在该地形上的良好运动能力。
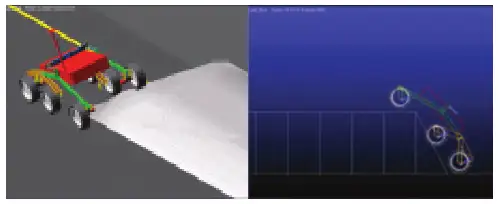
团队现在正在设计一种带有转向轮的新型漫游车(图5),以便在执行任务时实现更好的机动性。Adams 被用于研究新型行走系统转向机构的几何结构。新的漫游车也通过参加 2019 年的欧洲漫游车挑战赛进行了测试。